
Cs. Kádár Péter - XXI. századi Diszkónika, 340. Kefék nélkül
Amikor Jedlik Ányos feltalálta a villanymotort, még semmilyen elektronikus alkatrész sem létezett. Már azt is csodálattal nézték az érdeklődők, hogy az elektromos áram hatására egyáltalán forog valami.
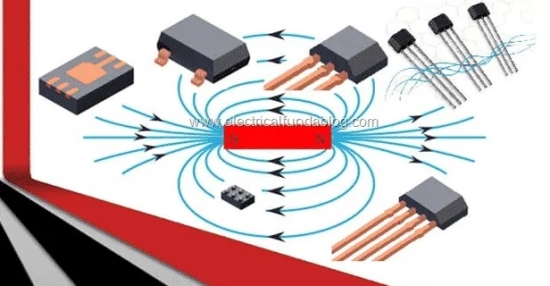
A 20. század második felében és különösen a 21. században egyre inkább igyekeztek megszabadulni a szikrázó keféktől, ezért a hagyományos kommutátor-kefe helyett elektronikus vezérléssel oldották meg a pólusváltást. Az alábbi animáció ennek a szerkezetnek, a kefe nélküli motornak a működését szemlélteti. A pirosra festett N az északi, a kékre festett S a déli pólus. A kép bal felén feltüntetett elektronika ne rettentsen el! A vezérlés konkrét, áramköri megvalósításával nem terhellek, csupán annyi az érdekes ebből, hogy egy mikrovezérlő, röviden µC kapcsolgatja a megfelelő tekercsekre a feszültséget FET-eken keresztül (lásd a sorozat 107. részét). A mikrovezérlők a mikroprocesszorokhoz hasonló, nagybonyolultságú, programozható, digitális integrált áramkörök, amelyeknek korlátozott utasításkészletei könnyen megtanulhatók.

A kefe nélküli motorokat külföldiül brushless direct current motornak hívják, és persze rövidítik is, BLDC-nek. A BLDC motorok trükkje, hogy fordítva ülünk a lovon.

A kefés motorban a forgórész, vagyis a rotor az elektromágnes, s ugyancsak a kefés motorban az állórész, a sztátor állandó mágnes – vagy legalábbis olyan elektromágnes, amelynek nem változik a tere, állandó mágnesként viselkedik. A BLDC motorban a forgórész van állandómágnesből, az állórész pedig elektromágnesekből áll. Továbbá van valami, ami figyeli a forgórész helyzetét, és ennek megfelelően kapcsolgatja az elektromágnesekre az áramot. A kapcsolgatást az animáción sárga felvillanás jelzi.

Tegyük fel, hogy a motor már lassan és a megfelelő irányba forog! Ekkor például az L2 tekercs felé közelít a mágnes az északi pólusával. Ahogy közelít, feszültséget kezd indukálni az L2 tekercsben, mivel változik a tekercs körül a mágneses tér. Az L2 tekercsben akármilyen áram is folyik, az erőssége változni fog. Ezt a változást némi átalakítás után (ezért vannak a FET-ek) észreveszi a µC. Úgy látja, hogy jön a mágnes, és az L2 tekercsre a µC olyan feszültséget kapcsol, hogy az áram által keltett mágneses tér vonzza az érkezőben lévő mágnest, vagyis ez lesz az L2 tekercs elektromágnesének a déli pólusa. Az előzőleg táplált tekercsről meg lekapcsolja a feszültséget. Az L2 tekercsre kapcsolt feszültséget egy ideig tartja a mikrovezérlő, s minél tovább tartja, annál erősebben „húzza” a mágnest. Azonban van egy pont, amikor már el kell engednie, különben visszafelé húzná. Ahogy a motor gyorsul, egyre nagyobb feszültséget indukál a mágnes a tekercsekben, amikor elhalad a közelükben. Ez a feszültség birkózik azzal a feszültséggel, ami a µC-ből érkezik, és a tekercsen áramot hajtana át, s aminek mágneses tere a mágnesre hatva gyorsítaná annak mozgását. Ha a motor sebessége elérné azt a szintet, ahol az indukált feszültség megegyezik a tekercsekre kapcsolt feszültséggel, a tekercseken már nem folyna áram, így nem lenne, ami tovább gyorsítaná a motort. Természetesen ez sohasem történik meg, mert mindig van veszteség és terhelés (a motor forgása nem öncélú, valamit hajtunk vele), ami lassítja a motor forgását. Ám létrejön az egyensúlyi állapot, amikor a motor éppen akkora teljesítményt vesz fel, mint amekkorát lead mozgás közben.
Ha eljutottál idáig anélkül, hogy belegabalyodtál volna, mi mit csinál, felmerülhet benned, hogy merre forog a motor? A valódi motorokban nem csupán három elektromágnes van és nemcsak egyetlen állandó mágnes. A BLDC motorokat úgy alakították ki, hogy három egymás mellett levő tekercsben szépen egymás után indukálódjon feszültség, és a sorrendből a forgásirány megállapítható legyen.

Ha a forgórész az óramutató járásával megegyező irányba forog, az indukált feszültség sorrendje L3, L2, L1. Ellenkező irány esetén L1, L2, L3.
Az ilyen módon működő motorok esetén az igazi nehézség az, hogy ha áll a motor, a forgórész helyzetét lehetetlen megállapítani. Induláskor a motor bepróbálkozik valamelyik tekerccsel, és a mikrovezérlő megnézi, hogy jó irányba és a megfelelő időben jönnek-e az indukciós jelek. Ha nem nyert a dolog, lefékezi a forgást, és bepróbálkozik másik tekerccsel. Néhány próbálkozás után ez sikerül is, de ezért rángatóznak az ilyen BLDC motorok induláskor. Mivel a motor induktív jószág, tehát a feszültség változásához képest késik az áramerősség változása, a mikrovezérlő a fázisszöget is figyelheti.
A BLDC motorok forgórészének helyzetét e bizonytalan módszer helyett egy ideje Hall-szenzorokkal érzékeltetik. Korábban már volt szó arról, hogy az elektromágnesesség modern elméletét James Clerk Maxwell rendszerezte. Maxwell szilárd matematikai alapot teremtett az elektromágneses elmélethez, a részletes mechanizmusokat viszont még vizsgálták. Az egyik ilyen kérdés a mágnesek és az elektromos áram közötti kölcsönhatás részleteire vonatkozott, beleértve azt is, hogy a mágneses terek kölcsönhatásba lépnek-e a vezetőkkel vagy magával az elektromos árammal. 1879-ben Edwin Elbert Hall ezt a kölcsönhatást vizsgálta, és felfedezte a róla elnevezett Hall-effektust.

A Hall-effektus a vezetőben vagy félvezetőben lévő áram természetéből adódik. Az áram sok kis töltéshordozó mozgásából áll: jellemzően elektronok, lyukak, ionok mozognak, vagy akár mind a háromféle is. Amikor a vezető vagy félvezető anyag mágneses térben van, ezek a töltések olyan erőt fejtenek ki, amelyet Lorentz-erőnek neveznek. Amikor ilyen mágneses tér nincs, a töltések megközelítőleg egyenes utakat követnek a szennyeződésekkel és más akadályokkal való ütközések között. Tehát ha nincs akadály, a töltéshordozók egyenes vonalban áramlanak. Ha azonban merőleges komponensű mágneses tér van jelen, az ütközések közötti útvonaluk elgörbül, így mozgó töltések halmozódnak fel az anyag egyik oldalán. Ez ugyanakkora és ellentétes töltéseket hagy a másik oldalon, ahol kevés a mozgó töltés. Az eredmény a töltéssűrűség aszimmetrikus eloszlása, amely olyan erőből ered, amely merőleges mind a töltéshordozók útvonalára, mind az alkalmazott mágneses térre. A töltés szétválása pedig olyan elektromos teret hoz létre, amely akadályozza a további töltésvándorlást, így állandó elektromos potenciálkülönbség, feszültség van mindaddig, amíg a töltések áramlanak. Ez a feszültség a Hall-feszültség. Az alábbi animáció ezt a jelenséget illusztrálja, így mindjárt érthetőbb.

Lényeges, hogy ez a hatás akkor is létezik, ha a mágneses tér nem változik, vagyis ha egy BLDC motor állórészére szerelnek egy megfelelő módon kialakított szenzort, az a forgórész helyzetét akkor is érzékeli, ha a motor forgórésze nem forog. S persze akkor is, amikor forog.

A Hall-szenzorok tehát olyan eszközök, amelyeket külső mágneses tér aktivál. Tudod, hogy a mágneses térnek két fontos jellemzője van: a fluxussűrűség (B) és a polaritás (északi vagy déli). A Hall-szenzor kimeneti jele az eszköz körüli mágneses tér sűrűségének függvénye. A potenciálkülönbség létrehozásához az eszközön a mágneses fluxusnak merőlegesnek kell lennie az áram irányára. A Hall-feszültség egyenesen arányos a mágneses tér erősségével.

A Hall-szenzorok általában vékony, négyszögletes p-típusú félvezető anyagból (lásd a sorozat 104-105. részét) állnak, például gallium-arzenidből (GaAs), indium-antimonidból (InSb) vagy indium-arzenidből (InAs). Ezekről az anyagokról annyit érdemes tudni, hogy a kristályszerkezetük olyan, mint a gyémánté, de kétféle atomból állnak. Ezt a térstruktúrát blende szerkezetnek hívják a kristályszerkezetek tudósai. Ha ennél többre vagy kíváncsi, fordulj hozzájuk, a fizika tán legérdekesebb ága ez!

Kétféle Hall-effektus érzékelő létezik: lineáris (analóg) kimenetű és digitális kimenetű. A lineáris kimenetű érzékelők folyamatosan változó nagyságú feszültségkimenetet használnak. A feszültség erős mágneses térben nő, gyengébb térben pedig csökken. A digitális kimenetű eszköznek van egy olyan áramköre, Schmitt-trigger bistabil billenőkörnek hívják, amely növeli vagy csökkenti a kimeneti digitális jelsorozat értékét, amikor a feszültség különböző küszöbértékekre emelkedik vagy csökken.
A Schmitt-trigger működését most szintén nem mesélem el, fontosabb, hogy a BLDC motorokat kétféle kivitelben gyártják. A kép baloldalán a belső rotoros, mellette a külső rotoros változat látható.

A belső rotoros motorok rotorja a sztátoron körül helyezkedik el. Az ilyen motorokat ott használják, ahol fontos a gyors és pontos beavatkozás, például robotok csuklójának mozgatásakor. A külső rotoros motorok rotorja a sztátoron kívülre kerül.

Ebben a kivitelben a sztátor mágneseit ferromágneses anyaggal veszik körül, ami a veszteségek és egyszersmind a keltett zajok csökkentésére hivatott.
Ilyen motorokat építenek analóg lemezjátszókba, CD, DVD és blu-ray meghajtókba, merevlemezek forgató mechanizmusába, számítógépek ventilátoraiba és persze szereltek magnókba is. Legtöbbjük szabályozása Hall-szenzoros; az érzékelőt napjainkban gyakran integrálják a szenzor parányi kimenő jelének erősítőjével és a µC-vel. Ilyen integrált szabályzóról készült az alábbi fotó.

Ami a magnókat illeti, az egyik első Hall-szenzoros BLDC motort a Grundig TS-1000 csúcskészülékébe szerelték. Ez az egyenáramú motor hajtotta meg az 1 kg tömegű lendkereket.

A sorozat előző részében visszafogottan lealáztam a néhai Grundigot. A TS-1000 viszont a maga idejében, 1976-ban, különlegesnek számított. Amúgy a prospektus címképén látható bármelyik modellt elfogadtuk volna, ideértve a biovezérlőket is.

A következő fotón olyan változat látható, amiben Dolby B zajcsökkentő és a mérésekhez, beállításokhoz szükséges hanggenerátor is van. A magnó állítólag működőképes. A tömege 22,5 kg.

Van ezen gomb dögivel. A TS-1000 sok erénye mellett azért nem volt elég sikeres, mert a menőség okán annyiféle – részben szellemes, részben felesleges – szolgáltatása volt, hogy macerás volt kezelni.
Ilyen a bele elölről.

És ilyen hátulról.

Íme, a fejszerelvény üvegferrit fejekkel. A törlőfej kétréses, a magnó mindkét irányban tudott lejátszani, a szalagsebesség pedig folyamatosan volt állítható.

Két darab, fordulatszámmérővel vezérelt, golyóscsapágyas, váltakozó áramú, külső forgórészes aszinkron motort csévélte a szalagot. Ami azt jelenti, hogy nemcsak egyenáramú motor van a világon.